Labor für Robotik und Regelungstechnik
Das Labor für Regelungstechnik und Robotik, setzt in Lehr- Entwicklungs- und Forschungsarbeiten moderne Themen von Industrie 4.0 um.
Hierzu gehören:
- Lehrpraktika (Bachelor)
- Entwicklungsprojekte (Bachelor-/ Master)
- Abschlussarbeiten (Bachelor-/ Master)
- Forschungsthemen
Regelungstechnik 1 und 2
Inhalte von Vorlesung und Praktika Regelungstechnik 1 und 2:
- Klassische Methoden der Regelungstechnik
- Modellbildung und Simulation
- Stabilität von Regelkreisen
- Regler-Entwurf und -Optimierung
- Digitale Regelungen
Robotik
Inhalte von Vorlesung und Praktika Industrierobotik:
- Bauformen, Komponenten und Kenngrößen
- Mathematische Beschreibung der Roboterkinematik
- Koordinatensysteme
- Danavit-Hartenberg-Konvention
- Forward- and Inverse kinematics
- Roboterprogrammierung (Anwender bis Fortgeschritten)
- Sicherer Betrieb von Industrierobotern
Systemtheorie
Inhalte der Vorlesung Systemtheorie:
- Systemtheoretische Grundlagen
- Verfahren zum Regler-Entwurf
- Reglerentwurf mit Frequenzkennlinien-Verfahren
- Betragsoptimum
- Symmetrisches Optimum
- Kompensationsregler
- Smith-Prädiktor
- Strukturelle Maßnahmen
- Zustandsregelung
- Zustandsraumdarstellung
- Regelung durch Zustandsrückführung
- Zustandsregelung mit Beobachter
Am Institut sind Themen in den Bereichen
- Robotik
- Regelungstechnik
Automatisierung
möglich. Konkrete Themen auf Anfrage.
Gerne betreuen wir auch eigene Themenvorschläge in Zusammenarbeit mit der Industrie.
Forschungs- und Entwicklungsthemen
- Offline Programmierung von Robotern
- Einsatz von ROS auf Industrierobotern
- Erprobung von Automatisierungskonzepten
Sprechstunde:
nach Vereinbarung
Artikel/Paper:
- Graf, T.; Biesenbach, R.; Falkenhain, J.; Analysis on State of the Art of Introducing Human-Machine-Collaboration Robots in Germany, SSD 2026, Catania, Italy, IEEE Xplore, March 2026
- Shehata, O., Biesenbach, R., Baniyounis, M., Falkenhain, J., Design and Implementation of a UFP Interface for Controlling KUKA LBR iiwa Robot Via Real-Time Hand Guiding, European Journal of Technic 15/2, December. 2025
- Tiz, N., Falkenhain, J. Biesenbach, R., Inverse Kinematics for a 6-Axis-Robot and Implementation of a Point-To-Point Movement, Mecatronics-REM 2025, Paris, France, 3. - 5. Dec. 2025, IEEE Xplore, December 2025
- Papurcu, S., Falkenhain, J., Biesenbach, R., Implementation of a Pick-and-Place Application Using Computer Vision and Robotics Algorithms, Mecatronics-REM 2025, Paris, France, IEEE Xplore, · December 2025
- Graf T., Biesenbach R., Falkenhain J., A MATLAB Software for Synchronous Robot Axis Control by Using Coordinate Transformation, 22th International Conference on Research and Education in Mechatronics (REM), IEEE Xplore, Dead Sea, Jordan, September 2024
- Graf T., Biesenbach R., Falkenhain J., A 3D Printed Six Axes Industrial Robot Model for Educational Purposes, , 22th International Conference on Research and Education in Mechatronics (REM), IEEE Xplore, Dead Sea, Jordan, September 2024
- Rosenstock R., Wrütz T., Biesenbach R., KUKA Robot Language Parser for Product Adaptive Manufacturing, 20th IEEE International Multi-Conference on Systems, Signals & Devices (SSD) 2023, IEEE Xplore, Mahdia, Tunisia, February 2023
- Mesmar A., Bani Younis M., Wrütz T., Biesenbach R., Remote Control Package for Kuka Robots using MATLAB, 17th International Multi-Conference on Systems, Signals & Devices (SSD), IEEE Xplore, Sfax, Tunisia, Juli 2020,
- Rehbein J., Wrütz T., Biesenbach R., Model-based industrial robot programming with MATLAB/Simulink, 20th International Conference on Research and Education in Mechatronics (REM), IEEE Xplore, May 2019
- Biesenbach R., Wrütz T., Plattformübergreifende MATLAB/Simulink-Umgebung zur KUKA Roboter Programmierung, MATLAB EXPO 2019, München, 2019
- Enien K., Wrütz T., Biesenbach R., Development of a PTP Movement of a Industrial Robot via MATLAB by deriving its Kinematics and Integration in an Offline Programming Tool, IEEE REM 2018, Delft, Nederlands, June 2018
- Wrütz T., Golz J., Biesenbach R., A Wireless Multirobot Network Approach for Industry 4.0 using RoBO2L, SSD2017 Marrakech, Morocco, March 2017 Biesenbach R., Wrütz T., Golz J., An Internet Platform for Open-Source Robot Offline Programming Interface RoBO2L, SSD2017 Marrakech, Morocco, March 2017
- Golz J., Wrütz T., Eickmann D., Biesenbach R., RoBO2L, a Matlab Interface for Extended Offline Programming of KUKA Industrial Robots, IEEE MECATRONICS - REM 2016, Compiegne, France
- Elshatarat H.L., Baniyounis M., Biesenbach R., Design and implementation of a RoBO2L MATLAB toolbox for a motion control of a robotic manipulator, 13th International Multi-Conference on Systems, Signals & Devices, SSD 2016, Leipzig, Germany
- Biesenbach R., Mechatroniker sind technische Generalisten, ZeitStudienführer 2016/17, p214-p216, Interview, Zeitverlag Gerd Bucerius GmbH & Co. KG, Hamburg, Germany, 2016
- Wrütz T., Golz J., Elshatarat H.L., Biesenbach R., Robot Offline Programming Tool (RoBO2L) for Model-Based Design with MATLAB, 2nd International Conference on Engineering Science and Innovative Technology (ESIT2016), Phuket, Thailand
- Golz J., Bergmann A., Biesenbach R., Implementation of an Autonomous Chess Playing Industrial Robot, with the RoBO2L Interface, 2nd International Conference on Engineering Science and Innovative Technology (ESIT2016), Phuket, Thailand
- Elshatarat H. L., Bani Younis M., Biesenbach R., Design and Implementation of a RoBO2L MATLAB Toolbox for a Motion Control Of a Robotic Manipulator, IEEE 13th International Multi-Conference on Systems, Signals & Devices, Leipzig, 2016
- Elshatarat H. L., Bani Younis M., Tutunji, T., Biesenbach R., MATLAB Toolbox Implementation and Interface for motion control of KUKA KR6R900-SIXX robotic manipulator, IEEE 16thInternational Conference on Research and Education in Mechatronics REM2015, Proceedings, ISBN 9783-945728-01-7, p12-15, Bochum, Germany, 2015
- Golz J., Biesenbach R., Implementation of an Autonomous Chess Playing Industrial Robot, IEEE 16th International Conference on Research and Education in Mechatronics REM2015, Proceedings, ISBN 9783-945728-01-7, p53-56, Bochum, Germany, 2015
- Schillo H., Biesenbach R., JIM2L – Development and Implementation of a MSc Double Degree Program in Mechatronics for in Egypt, Jordan and European Union, IEEE 16thInternational Conference on Research and Education in Mechatronics REM2015, Proceedings, ISBN 9783-945728-01-7, p197-202, Bochum, Germany, 2015
- Biesenbach R., Fostering the Exchange, The Best of Both Worlds, The German Dimension, 10 Years of German Jordanian University, edited by Jecht D., p184 185, ISBN 978-9957-8712-0-8, Amman, Jordan, 2015
- Biesenbach R., Die Industrie braucht mehr Mechatronik Ingenieure, VDI Nachrichten, Ausgabe 45, interview and article, Düsseldorf, Germany, 2014
- Stepien, M., Biesenbach R., Integration of a 2D Vision System into a Control of an Industrial Robot, proceedings, International Conference on Engineering Science and Innovative Technology (ESIT 2014), Krabi, Thailand, 2014
- Loske, J., Biesenbach R., Analysis of Options on the Integration of a ForceTorque Sensor in the Control of KUKA KRC 2 edition05 of an Industrial Robot, proceedings, International Conference on Engineering Science and Innovative Technology (ESIT 2014), Krabi, Thailand, 2014
- Loske, J., Biesenbach R., Forcetorque sensor integration in industrial robot control, IEEE 15th International Conference on Research and Education in Mechatronics REM2014, Proceedings, Al Gouna, Egypt, 2014
- SchweizerRies, P., Pautzke, F., MetznerSzigeht, A., Biesenbach R., Bochum University of Applied Sciences on the way to establish sustainability Education, Vortrag, 9th International Symposium on Mechatronics and its Applications IEEE ISMA’13, Amman, Jordan
- Biesenbach R. Schillo H., JIM2L – An International Network on Development and Implementation of a MSc Program in Mechatronics for Egypt and Jordan, proceedings, IEEE MECATRONICSREM 2012, Paris, France, 2012
- Bartsch T., Biesenbach R., Koch A., Weinert A., Analysis of State of the Art in Remote Control Applied on a KUKA KRC2 Robot Control, proceedings, 12th International Workshop on Research and Education in Mechatronics, Kocaeli, Turkey, 2011
- Biesenbach R. , Alfes S., Dombrowski U., An Application Development System for Process Control of Dynamic Systems, Proceedings of the ISRM 2009, IFToMM International Symposium on Robotics and Mechatronics, Hanoi, Vietnam, 2009
- Biesenbach R. , Nowak C., Dombrowski U., A Transient Simulation Model of a Hard coal fired Power plant, proceedings, 10th International Workshop on Research and Education in Mechatronics, Glasgow, UK, 2009
- Biesenbach R., Entwurf eines mathematischen Modells zur dynamischen Simulation eines Kraftwerksprozesses, Research Report, Hochschule Bochum, 2009
- Nowak C., Pautzke F., Biesenbach R., Development of the Industrial Communication Laboratory at the Mechatronics Department of CDHAW at Tongji University, Shanghai, proceedings, 9th International Workshop on Research and Education in Mechatronics, Bergamo, Italy, 2008
- Biesenbach R., Mattar T., von Laue S. , DIMPTOT: Development of an industrylinked Mechatronics Program with Training of Trainers, REM2007, Research and Education in Mechatronics 2007, Tallinn, Estonia, ISBN 9789985-59-707-1, p 218-224, June 2007
- Teriete A., Pautzke F., Biesenbach R., An autonomous robot platform for research and education on efficient energy, drive and control strategies, REM2007, Research and Education in Mechatronics 2007, Tallinn, Estonia, ISBN 9789985-59-707-1, p 95-100, June 2007
Keynotes:
- Biesenbach R., Smart Factory: the 4th Industrial Revolution, Keynote Speech, 2017, IEEE Jordan Conference on Applied Engineering and Computing Technologies (AEECT)
- Biesenbach R., Sustainable Individual Mobility, Keynote speech, 2nd International Conference on Engineering Science and Innovative Technology (ESIT2016), Phuket, Thailand
- Biesenbach R., Research and Education for an Electric Mobility Future, Keynote speech, 9th International Symposium on Mechatronics and its Applications IEEE ISMA’13, Amman, Jordan
Bücher:
- Biesenbach R., Weinert A. (Editors), 16th International Conference on Research and Education in Mechatronics, Deutsche Gesellschaft für Mechatronik e.V., ISBN 978-3-945728-01-7, Bochum, Germany, 2015
- Biesenbach R., Kluszczynski K., Sattar T., Mechatronics Engineering Workshops, Deutsche Gesellschaft für Mechatronik e.V., ISBN 978-3-945728-00, Bochum, Germany, 2014
- Biesenbach R., Rotter K. (Editors), Mechatronics Introductory Course, EU Tempus DIMPTOT Project Team, Mechatronik e.V., ISBN 978-3-9813468-0-0, Cairo, Egypt, 2010
- Biesenbach R., Lauer A., Struth S., C.A.S.H. – Ein instationäres Gesamtanlagenmodell für ein HTR-Modul-Kraftwerk, JÜL-3403, Berichte des Forschungszentrum Jülich, ISSN 0944-2952, Jülich, 1997



Roboter
KUKA KR 16, KR 6 R900 sixx (Standard Industrie Roboter), KUKA LBR iiwa 7 R800 (sensitiver Leichtbauroboter)
Controller
- KRC4 Steuerungen (Robotersteuerung)
- KRC4 compact Steuerungen (Robotersteuerung)
- KRC2 Steuerungen (Robotersteuerung)
- 4 Siemens TIA … (RS Rehbein)(Industrielle SPS zur Mensch-Maschine-Interaktion)
Versuchsstände
- Schwebekugel
- Doppelpropeller
- Luftstromversuch
- Inverses Pendel
- Segways
Hard- und Software
- Rapid Controll Prototyping Systeme dSPACE DS1104, DS1103, MicroAutoBox II
- MATLAB/Simulink – Modellbildung, Reglerentwurf, Simulation
- dSPACE - Rapid Controll Prototyping, RealtimeWorkShop
PS: Auflösung zum Rätsel des Einstiegsbildes [KUKA ORANGENEWS]. Das Bild entstand im Rahmen eines Besuches der Königin Rania von Jordanien an der German Jordanian University.
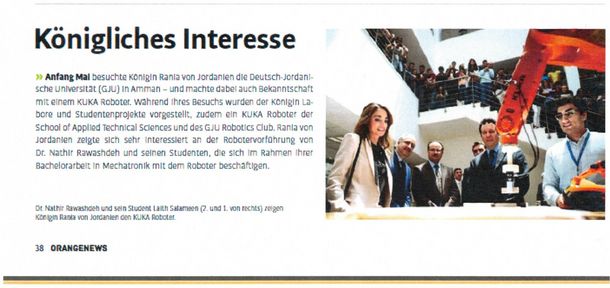
Im Rahmen eines internationalen Projektes der Hochschule Bochum (Prof. Biesenbach) mit der German Jordanien University, JO (Prof. Rawashdeh, im Bild), der Philadelphia University, JO (Prof. Tutunji), der Zagazig University, EG (Prof. Mostafa), dem Higher Technology Institut, EG (Prof. Hendawy), der London South Bank University, UK (Prof. Sattar), der Silesian University of Technology, PL (Prof. Kluszczynski), der Deutschen Gesellschaft für Mechatronik (Prof. Löffler-Mang) und der E.ON Ruhrgas, (Hans Schillo) wurden für die ägyptischen und jordanischen Universitäten jeweils Mechatronik-Labore entwickelt und die entsprechende Laborausrüstung beschafft. Teil dieser Labore war auch der oben im bildstehende KUKA Roboter.
Ein weiteres Ergebnis ist der mit den beteiligten Universitäten entwickelte Masterstudiengang Mechatronik. Zwischen der Hochschule Bochum und der Philadelphia University sowie der Zagazig University, besteht ein beidseitiges Double Degree Programm Austauschprogramm. Teilnehmer an dem Austauschprogramm erhalten sowohl eine Master Urkunde der Hochschule Bochum, der Philadelphia University oder der Zagazig University. Interessenten zum Programm wenden sich direkt an mich oder an das International Office der Hochschule.

Sprechstunde:
nach Vereinbarung