Labor für Regelungs- und Fahrzeugsystemtechnik

Das Labor für Regelungs- und Fahrzeugsystemtechnik von Prof. Lemmen besitzt einen Fahrerlebnisplatz der Firma IPG.
Der Simulator ist mit einem Echzeitrechner XPack4 ausgestattet, auf dem mit Hilfe des Mehrkörper-Fahrzeugsimulationsprogramm CarMaker der Firma IPG in Echtzeit sämtliche relevanten Kräfte im Reifen, dem Fahrwerk etc. berechnet werden.
Mit Hilfe des Programms sind nicht nur Gesamtfahrzeug mit ihren Komponenten zu simulieren sonden es ist auch möglich Steuergeräte, wie beispielsweise ein ESP (=elektronisches StapilitätsProgram, bzw. Anti-Schleuder-Hilfe) mittels CAN-Bus in Echtzeit in die Simulation einzubinden.
Folgende Praktika werden u.a. in diesem Labor durchgeführt


- Simulation mit Matlab/Simulink
- Simulation und Echtzeitregelung mit Boris-Winfact
- Identifikation des Systemverhaltens und Regelung eines Drehtellers
- Identifikation des Systemverhaltens und Regelung eines Zeppelins
- Identifikation des Systemverhaltens und Regelung eines Quadrokopters
Beispiele aus der Lehrpraxis
Automatisiertes Fahren & Autonome Roboter
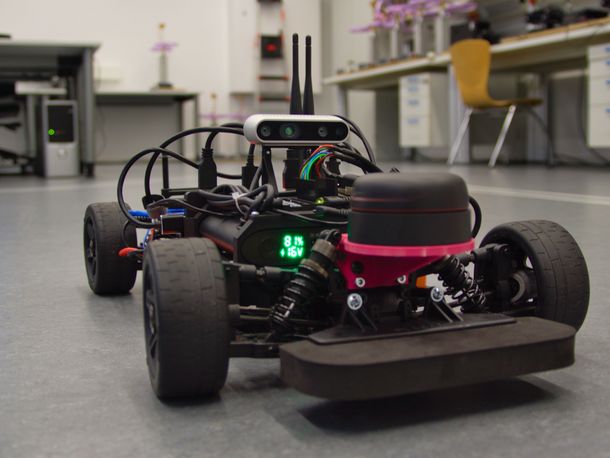
Im Bereich der Autonomen Roboter verfügt das Labor RACELAB bereits seit mehreren Jahren Erfahrung. Diese Erfahrung werden derzeit auf den Bereich des Automatisierten / Autonomen Fahrens übertrgen und ausgebaut.
So baut das Labor derzeit eine Plattform auf in der Modellgröße 1:8 um hier auch den Studierenden bereits während des Bachelorstudiums erste (praktische) Erfahrungen in diesem Feld sammeln zu können. Hier sind insbesondere Systeme hilfreich, die ROS-kompatibel sind (ROS=Robot Operating System), da durch ROS die Herausforderungen an die Studierenden in großem Maßstab von verhältnismäßig leicht bis hin zu schwer / Forschung skalierbar sind.
Als ein vielversprechendes Beispiel ist hier unser sogenannte "VDI-Racer" zu nennen, der eine Teilnahme eines Teams aus unseren Studierenden an dem VDI-Cup Autonomous Driving erlaubt (entsprechend dem Rennreglement 2021).
Konzeption eines Lenkungsprüfstands

- Im Rahmen der Vorlesung Mechatronik haben Studierende selber einen Lenkungsprüfstand konzipiert, gebaut und in Betrieb genommen.
- Die Lenkung ist ein elektromechanisches Lenksystem der Firma TRW, welches aktuell bei der Firma Ford in verschiedenen Modellen eingesetzt ist.
- Die Studierenden hatten als Aufgabe, einen entsprechenden Prüfstand zu entwerfen, der die Fahrzeuggeschwindigkeitsabhängigkeit der Lenkung erfühlbar macht.
- Entsprechend simuliert die von den Studierenden selber entworfene und geätze Schaltung den gesamten Restbus des Fahrzeugs, der notwendig ist, um der Lenkung zu suggerieren, es befände sich im Fahrzeug mit veränderlicher Fahrzeuggeschwindigkeit.
Entwurf und Bau eines Quadrocopters


Ein Quadrocopter ist ein Luftfahrzeug, eine Schwebeplattform, die vier in einer Ebene (Viereck) angeordnete, vertikal ausgerichtete Propeller verwendet. Im Rahmen des Problem-Based-Learning-Projektes realisieren die Studenten weitgehend selbständig die Konstruktion des mechanischen Trägers des Flugobjektes und den Zusammenbau sowie die Programmierung der benötigten elektrischen und elektronischen Komponenten. Im Einzelnen sind die Aufgaben:
- Entwurf und Fertigung der mechanischen Trägerkonstruktiond es Flugzeugs,
- Zusammenbau aller benötigten elektrischen Komponenten - einschließlich der Elektromotoren,
- Zusammenbau der Elektronik (Steuergeräte und Sensoren),
- Programmierung der Prozessoren und
- automatisierte Lagestabilisierung und Drehzahlregelung der vier Propellermotoren.
Multitechnikum

Im Multitechnikum besitzt unser Labor einen kompletten Lenkungsprüfstand.
Verantwortlich

