- Angewandte Elektrotechnik
- Angewandte Informatik
- Automatisierungstechnik
- Autonome Systeme
- Elektronik und Signalverarbeitung
- Hardwarenahe IT-Systeme
- ITK-Infrastrukturen und -Dienste
- Konstruktion und CAE
- Mechanik und Fahrzeugdynamik
- Physik und Werkstoffkunde
- Regelungs- und Fahrzeugsystemtechnik
- Softwaretechnik
- Wirtschaftsinformatik
Regelungs- und Fahrzeugsystemtechnik
Herzlich willkommen auf der Seite der Professur für Regelungs- und Fahrzeugsystemtechnik.
Die Professur beschäftigt sich mit Fragen rund um die Regelungstechnik und Systemtheorie sowie der Fahrzeugsystemtechnik.
Geleitet wird es durch Prof. Dr.-Ing Markus Lemmen.
Prof. Dr.-Ing. Markus Lemmen ist Professor für Regelungs- und Fahrzeugsystemtechnik und seit Februar 2012 an den Campus Velbert-Heiligenhaus (CVH) berufen.
Die Promotion von Herrn Lemmen erfolgte an der Universität Duisburg im Bereich der nichtlinearen Systemanalyse am Institut Mess-, Steuer- und Regelungstechnik. Daran schloss sich eine Postdoktorandenphase in Duisburg und an der Technischen Universität Eindhoven (NL) im Bereich der nichtlinearen Regelung dynamischer Systeme, speziell der hydraulischen Zylinderantriebe an. Danach wechselte Herr Lemmen für nahezu zehn Jahre zur Industrie und arbeitete bei der Firma Ford. Hier beschäftigte er sich die ganze Zeit über mit Themen aus dem Bereich der Fahrdynamik (Vehicle Dynamics). Zunächst geschah dies im Rahmen der Forschungs- und Vorausentwicklung bei Global Vehicle Dynamics und dann ca. sieben Jahre lang bei der Serienproduktentwicklung bei Vehicle Dynamics. Bekannt sind vielen insbesondere die elektromechanische Lenkung (EPAS) des aktuellen Ford Fiesta und dem C-Max/Grand C-Max. Neben diesen Fahrzeugen arbeitete Herr Lemmen an anderen aktuellen Produkten der Firma Ford, von denen einige in Kürze in Serie gehen werden.
Auf den verschiedenen Seiten der Professur und des Labors sowie des Multitechnikums erhalten Sie Informationen zur angebotenen Lehre, Forschungs- und Entwicklungstehemen sowie weiterführende Informationen.
Bei Fragen zögern Sie bitte nicht mich zu kontaktieren.
Mit freundlichen Grüßen,
Prof. Dr.-Ing. Markus Lemmen
Leiter
Prof. Dr.-Ing. Markus Lemmen ist seit dem 1.2.2012 am Campus CVH berufen als Professor für Regelungs- und Steuerungstechnik.
Seine Promotion erfolgte an der Universität Duisburg am Fachgebiet für Mess-, Steuer- und Regelungstechnik im Themengebiet der nichtlinearen Systemtheorie und Systemanalyse (summa cum laude).
Daran schloss sich eine Postdoktorandenzeit in Duisburg und an der Technischen Universität Eindhoven an. In dieser Zeit war der Forschungsschwerpunkt im Bereich der nichtlinearen Reglersynthese für dynamische Systeme, insbesondere für Hydraulikantriebe.
Im Zeitraum vom 1.4.2002 bis zum 31.1.2012 sammelte Herr Lemmen Erfahrungen in der Industrie und arbeitete bei der Firma Ford im Bereich der Fahrdynamik; zunächst in der Forschungs- und Vorausentwicklung (Global Vehicle Dynamics) und anschließend für ca. 7 Jahre bei der Produkt- und Seriententwicklung (Vehicle Dynamics). Während dieser Zeit vertiefte Herr Lemmen sein Wissen im Bereich der Hydraulik und erwarb darüber hinaus umfangreiches Wissen im Bereich Fahrdynamik, Lenkungen, subjektiven und objektiven Bewertungs- und Messmethoden in der Fahrzeugentwicklung sowie während Testfahrten unter unterschiedlichsten Bedingungen.
Wissenschaftliche Mitarbeiter

Forschungs- und Entwicklungsthemen
Die Arbeitsgebiete sind im Wesentlichen aufgeteilt auf Themen der Regelungstechnik und Systemtheorie sowie auf Themen aus dem Bereich der Fahrzeugentwicklung entsprechend der Vita von Herrn Lemmen. Die bisher gesammelten Forschungs- und Entwicklungserfahren stammen aus den Bereichen:
Regelungstechnik und Systemtheorie:
- nichtlineare Systemtheorie (differentialgeometrische und differentialalgebraische Methoden): Systemanalyse und Reglersynthese,
- Regelung von Hydraulikzylindern,
Fahrzeugtechnik
- Fahrdynamik,
- Fahrzeugsystemtechnik,
- Lenkungs- und Fahrwerksoptimierung,
- Hydrauliklenkungen,
- Elektrohydraulische Lenkungen,
- Elektromechanische Lenkungen in der Lenksäule (Column-EPAS),
- Elektromechanische Lenkungen im Lenkgetriebe (Rack-EPAS / Rack-Offset-EPAS),
- Fahrzeugversuche:
- Reproduzierbare subjektive Beurteilung und Bewertungen von Fahrzeugen sowie deren Objektivierung,
- Objektive Fahrzeugtests.
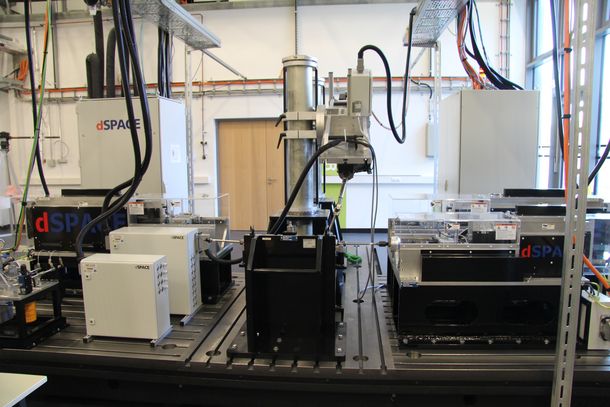

Im Multitechnikum verfügt die Professur für Regelungs- und Fahrzeugsystemtechnik einen Lenkungssystemprüfstand der Firma dSPACE. Mit diesem Prüfstand können ganze Lenksysteme (also vom Lenkrad bis hinunter zu den Spurstangen, die die Vorderräder eines Fahrzeugs lenken) als mechatronisches Gesamtsystem geprüft und untersucht werden.
Dafür stehen unterschiedliche Sensoren und Aktoren zur Verfügung, die je nach Bedarf auch erweitert werden können. Im wesentlichen besteht dabei der Lenkungssystemprüfstand aus einem Elektromotor, der am Lenkrad das Lenken übernimmt und Spurstangenaktoren in Form von Linearantrieben, die die Spurstangenkräfte aufprägen können. Die Drehmomente und Positionen des Motors und die Kräfte und Positionen der bis zu drei unterschiedlichen Linearaktoren werden gemessen und stehen für eine entsprechende Lastregelung zur Verfügung.

Das Labor für Regelungs- und Fahrzeugsystemtechnik besitzt einen Fahrerlebnisplsatz der Firma IPG.
Der Simulator ist mit einem Echzeitrechner XPack4 ausgestattet, auf dem mit Hilfe des Mehrkörper-Fahrzeugsimulationsprogramm CarMaker der Firma IPG in Echtzeit sämtliche relevanten Kräfte im Reifen, dem Fahrwerk etc. berechnet werden.
Mit Hilfe des Programms sind nicht nur Gesamtfahrzeug mit ihren Komponenten zu simulieren sonden es ist auch möglich Steuergeräte, wie biespielsweise ein ESP (=elektronisches StapilitätsProgram, bzw. Anti-Schleuder-Hilfe) mittels CAN-Bus in echtzeit in die Simulation einzubinden.

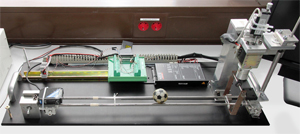
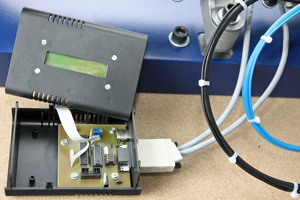
Das Bild zeigt einen Lenkungsprüfstand, den die Studenten im Rahmen der Vorlesung Mechatronik selber konzipiert, gebaut und in Betrieb genommen haben.
Die Lenkung ist ein elektromechanisches Lenksystem der Firma TRW, welches aktuell bei der Firma Ford in verschiedenen Modellen eingesetzt ist.
Die Studenten hatten als Aufgabe einen entsprechenden Prüfstand zu entwerfen, der die Fahrzeuggeschwindigkeitsabhängigkeit der Lenkung erfühlbar macht.
Entsprechend simuliert die von den Studenten selber entworfene und geätze Schaltung den gesamten Restbus des Fahrzeugs, der notwendig ist um der Lenkung zu suggerieren es befände sich im Fahrzeug mit veränderlicher Fahrzeuggeschwindigkeit.
Dissertation
- Markus Lemmen. 1998. „Über Relative und dynamische Systeme.“ VDI Fortschritt-Berichte. Reihe 8. Nr. 711. Düsseldorf: VDI
Zeitschriften
- Lemmen, Markus und Marc Schleuter. 1996. „Relational Control Structures.“ Results in Mathematics Vol. 29. 100-110 (1996). ISSN 1422-6383; ISSN 0378-6218
- Wey, Torsten und Markus Lemmen. 1999. „Flatness based control for hydraulic drives.“ Stability and Control: Theory and Applications SACTA 1. 22-40.
Buch- und Konferenzbeiträge sowie Sammlungen
- Lemmen, Markus, Michael Peperhowe, Olav Lange und Michael Moczala. "Objective and Subjective Steering Feel HiL Testing on a New High Performance Steering HiL with Virtual Vehicle Prototypes". ATZ Steer.Tech&Chassis.Tech. 2020.
- Frochte, Jörg, Markus Lemmen und Marco Schmidt. 2020. "Concerning the Integration of Machine Learning Contents in Mechatronics Curricula". Revolutionizing Education in the Age of AI and Machine Learning” (IGI Global).
DOI: 10.4018/978-1-5225-7793-5.ch004
- Frochte, Jörg, Markus Lemmen und Marco Schmidt. 2018. "Seamless Integration of Machine Learning Contents in Mechatronics Curricula". Proceedings of the IEEE 19th International Conference on Research and Education in Mechatronics (REM 2018), June 2018 in Delft, Netherlands.
- Lemmen, Markus und Marco Schmidt. 2016. „Labor Bahnplanung und Regelung von Robotern". Studienheft BSR-L. Wilhelm Büchner Hochschule Darmstadt.
- Patrick Bouillon, Jörg Frochte und Markus Lemmen. „Influence of Plant Model Variants for the Automatic Optimisation of Control." REM 2015, Bochum.
- Lemmen, Markus und Wolfgang Bongarth. „Steering systems: Background and context in connected chassis and connected cars." IQPC Steering Systems 2015, Düsseldorf. Invited Lecture.
- Lemmen, Markus und Dirk Nissing. 2011. „Die neue elektromechanische Lenkung der Ford C-MAX and Ford Focus Familie." Steer.Tech&Chassis.Tech, München. 2011.
- Lemmen, Markus. 2007. „Modern Steering Systems – Objectives, Components, Perspectives." CTi Conference Steering Systems, Bonn. 26.-27. März 2007.
- Lemmen, Markus. 2006. „Modern Steering Systems and their Components." 1. IQPC Advanced Steering Systems Konferenz, Frankfurt. 10.-12. Mai 2006.
- Lemmen, Markus. 2005. „Moderne Lenksysteme und ihre Komponenten." Fahrwerk.Tech, München. 4.-5. April 2005.
- Eidam, Dirk-Uwe und Markus Lemmen. 2005. „Entwurf Auslegung von Lenksystemen zur Vermeidung von Lenkungsverhärtungen." 4. Tagung PKW Lenksysteme, Haus der Technik, Essen.
- Lemmen, Markus. 2003. „Moderne Lenksysteme – Anforderungen, Möglichkeiten, Zukunftsperspektiven." IIR Fachtagung Lenksysteme, Nürtingen.
- Lemmen, Markus. 2003. „Entwurf und Anforderungsdefinition moderner Lenksysteme und –getriebe." 3. Tagung PKW Lenksysteme, Haus der Technik, Essen.
- Bröcker, Markus und Markus Lemmen. 2001. „Nonlinear Control Methods for Disturbance Rejection on a hydraulically driven flexible Robot.“ IEEE Second International Workshop On Robot Motion And Control, RoMoCo 2001. 18.-20. Oktober 2001. Bukowy Dworek (Polen).
- Lemmen, Markus, Markus Bröcker, Bram de Jager und Harm van Essen. 2000. „CACSD for hydraulic cylinders.“ IEEE International Conference on Control Applications & IEEE International Symposium on Computer-Aided Control Systems Design. Anchorage/Alaska(USA). 25.-27. September 2000.
- Lemmen, Markus und Markus Bröcker. 2000. „Different Nonlinear Control Schemes for Hydraulic Drives.“ 19th Benelux Meeting on Systems and Control. Mierlo (NL). 1.-3. März 2000.
- Lemmen, Markus und Markus Bröcker. 2000. „Different Nonlinear Controllers for Hydraulic Synchro-nizing Cylinders.“ 14th International Symposium on Mathematical Theory, Networks and Systems (MTNS 2000). Perpignon / France. 19.-23. Juni 2000.
- Bröcker, Markus, Jan Polzer und Markus Lemmen. 2000. „An advanced algorithm based on diffe-rential algebra for disturbance decoupling of nonlinear systems.“ 39th IEEE Conference on Decision and Control (CDC 2000). Sydney (Australien). 12.-15. Dezember 2000.
- Wey, Torsten, Markus Lemmen und Werner Bernzen. 1999. „Hydraulic actuators for flexible robots: A flatness based approach for tracking and vibration control.“ European Control Conference (ECC'99). Karlsruhe. F1000-2.
- Lemmen, Markus und Markus Bröcker. 1999. „Nonlinear Control of Hydraulic Differential Cylinders.“ Proceedings of the 1st Pedagogical School of the Nonlinear Control Network. NCN. Athen. 441-444.
- Lemmen, Markus und Torsten Wey. 1998. „Flachheitsbasierte Regelung hydraulisch betriebener Translationsantriebe.“ 33. Regelungstechnisches Kolloquium in Boppard.
- Lemmen, Markus und Torsten Wey. 1998. „Flachheitsbasierte Regelung eines hydraulischen Diffe-rentialzylinders.“ VDI/VDE GMA-Kongreß "Meß- und Automatisierungstechnik". VDI-Berichte Nr. 1397. 869-876. Düsseldorf: VDI-Verlag.
- Markus Lemmen. 1998. „Flatness Control for a Hydraulic Drive.“ In: Proceedings of the 2nd IMACS International Conference on: Circuits, Systems and Computers., Ed.: N. Mastorakis. IMACS. Athen. 726-731.
- Wey, Torsten und Markus Lemmen. 1998. „Computer-aided Analysis and Controller Design for Non-Flat Systems.“ In: Advances in Systems, Signals, Control and Computers. Ed.: V.B. Bajic. IAAMSAD: Durban (Südafrika). 16-20.
- Markus Lemmen und Marc Schleuter. 1996. Relational Control Structures and reachability/controllabi-lity. Proc. MTNS – Mathematical Theory of Networks and Systems, St. Louis, Missouri, USA (1996).
Forschungsberichte (MSRT)
- FB 16/97 Michael Berger, Thomas Bernd, Rolf Lasaar und Markus Lemmen: Untersuchung einer neuen Familie von Verknüpfungs-Operatoren in Fuzzy-Systemen.
- FB 11/97 Torsten Wey und Markus Lemmen: Flachheitsbasierte Regelung - Folgeregelung eines hydraulischen Differentialzylinders.
- FB 05/97 Markus Lemmen: Ausgangs-Regel-Relative und Nulldynamik.
- FB 10/96 Markus Lemmen: Systembeschreibende Graphen – Grundlagen.
- FB 08/96 Markus Lemmen und Mohieddine Jelali: Differentialgeometrische Steuer- und Beobachtbarkeitsanalyse nichtlinearer Systeme.
- FB 02/96 Marc Schleuter und Markus Lemmen: Ausgangs-Regel-Relative.
- FB 20/95 Markus Lemmen, Torsten Wey und Mohieddine Jelali: NSAS - Ein Computer Algebra Programm zur Synthese und Analyse nichtlinearer Systeme.
- FB 08/95 Markus Lemmen und Marc Schleuter: Relationentheoretische Beschreibung der Begriffe Steuerbarkeit, Erreichbarkeit und Zugänglichkeit nichtlinearer Systeme.
- FB 03/95 Markus Lemmen: Steuerbarkeit - Erreichbarkeit - Zugänglichkeit algebraische und differerentialgeometrische Aspekte.
- FB 02/95 Markus Lemmen und Marc Schleuter: Regel-Relative: Definition, Vergleich und Anwendung auf dynamische Systeme.
Patente
- Jörg-Peter Schalz, Markus Lemmen und Dirk-Uwe Eidam. 2020. Verfahren zum Betreiben eines Lenksystems zum Lenken eines Kraftfahrzeugs sowie Lenksystem und Kraftfahrzeug.
Deutsches Patent- und Markenamt DE 10 2008 036 001 B4 2020.01.23. B62D 6/00 (2006.01). Anmeldetag 01.08.2008. Offenlegungstag 04.02.2010. Veröffentlichung der Patenterteilung 23.01.2020. - Markus Lemmen, Torsten Wey, Edwin Vliem, Dirk-Uwe Eidam, Bengt Johan Henrik Jacobsen und Johan Hultén. 2010. Roll stability control and roll-over mitigation by steering actuation (Wankstabilitätsregelung und Verminderung einer Umkippgefahr durch Lenkungsbetätigung). Europäische Patentschrift EP 1920994B1. Bulletin 2010/21.
- Ulrich Kramer, Markus Lemmen und Ulla Weimann. 2007. Verfahren zum kontrollierten Abstellen einer mit einer hydraulischen Lenkunterstützung ausgestatteten Brennkraftmaschine. Europäische Patentschrift EP1659279B1. Patentblatt 2007/39.
Lehrveranstaltungen
Lehrveranstaltungen im Rahmen der Bachelor-Ausbildung am CVH:
- Mathematik für Ingenieure 1 (CVH-002).
- Vertiefung Mechatronik (CVH-022).
- Grundlagen System- und Regelungstechnik (CVH-013).
- Wahlmodul Regelungstechnik (CVH-026)
- Projekte im Rahmen des KIS-Studiums: KIS-Praxisphase (CVH-014), KIS-Projekt (CVH-015), KIS-Projekt interdisziplinär (CVH-016)
- Bachelorarbeit mit Kolloquium (CVH-034)
- Fahrerassistenzsysteme und Fahrwerkstechnik (zusammen mit Herrn Prof. Dr.-Ing. Stefan Breuer MA-CVH-4)
- Fahrdynamik in Simulation und Versuch (zusammen mit Herrn Prof. Dr.-Ing. Stefan Breuer MA-CVH-5)
- Vertiefung Regelungstechnik (MA-CVH-2-3)
- Labor- und Industrieprojekt (MA-CVH-6)
- Entwicklungsprojekt (MA-CVH-16)
- Projektsemester (MA-CVH-12)
Laborpraktika im Rahmen der Regelungstechnikvorlesung
Die Studenten am Campus Velbert/Heiligenhaus (CVH) müssen im Rahmen der Vorlesung Regelungstechnik Praktika absolvieren. Das Labor befindet sich noch im Aufbau. Aufgrund der sehr guten Unterstützung des Labors für Steuerungs- und Regelungstechnik von Prof. Dr.-Ing. Michael Pohl der HS Bochum konnten bereits im ersten Semester der Veranstaltung neben Simulationen auch schon Praktika an Versuchsträgern durchgeführt werden.
Die Praktika im Rahmen der Vorlesung Regelungstechnik (Pflichtveranstaltung für alle Studierende des CVH) sind:
- Simulation mit Matlab/Simulink
- Simulation und Echtzeitregelung mit Boris-Winfact
- Identifikation des Systemverhaltens und
Regelung eines Drehtellers - Identifikation des Systemverhaltens und
Regelung einer Kugelwippe - Identifikation des Systemverhaltens und
Regelung eines Verladekrans
Projekte im Rahmen der Lehrveranstaltungen
Im Rahmen der Vorlesungen werden teilweise interdisziplinäre Projekte bearbeitet. Dies erfolgt insbesondere im Rahmen der Vorlesung Vertiefung Mechatronik CVH-022:
- Realisierung eines Prüfstands einer elektromechanischen Lenkung:
Im Rahmen eines Problem-Based-Learning-Ansatzes realisieren die Studenten weitgehend selbständig einen Prüfstand für ein elektromechanisches Lenksystems der Firma Ford. Die Studenten erarbeiten dabei eigenverantwortlich - die Konstruktion des mechanischen Trägers,
- Auslegung der Belastungsfedern,
- der Enwurf der Elektrik,
- den Entwurf der Elektronik zur Generierung und Verarbeitung sämtlicher benötigter Signale und Algorithmen inklusive der Restbussimulation des gesamten Fahrzeugs,
- Realisierung des CAN-Bus,
- Ätzen der Platinen und Bestückung,
- Programmierung aller Algorithmen,
- Fertigung aller Komponeten,
- Inbetriebnahme

Ich bedanke mich bei allen beteiligten Firmen für deren Unterstützung des Projektes im Rahmen der Volresung.
- Entwurf und Bau eines Quadrocopters: Ein Quadrocopter ist ein Luftfahrzeug, eine Schwebeplattform, die vier in einer Ebene (Viereck) angeordnete, vertikal ausgerichtete Propeller verwendet. Im Rahmen des Problem-Based-Learning-Projektes realisieren die Studenten weitgehend selbständig die Konstruktion des mechanischen Trägers des Flugobjektes und den Zusammenbau sowie die Programmierung der benötigten elektrischen und elektronischen Komponenten. Im Einzelnen sind die Aufgaben:
- Entwurf und Fertigung der mechanischen Trägerkonstruktiond es Flugzeugs,
- Zusammenbau aller benötigten elektrischen Komponenten - einschließlich der Elektromotoren,
- Zusammenbau der Elektronik (Steuergeräte und Sensoren),
- Programmierung der Prozessoren und
- automatisierte Lagestabilisierung und Drehzahlregelung der vier Propellermotoren.
Die Besonderheit gerade dieses letzten Projektes "Bau eines Quadrocopters" liegt darin, dass dieser Quadrocopter auch als Plattform für ein anderes interdisziplinäres Projekt dient, in das drei verschiedene Lehrveranstaltungen münden.
- Bau eines Indoor-Positioning-Systems (IPS) und dessen Nutzung zur globalen Positionsregelung von Quadrocoptoren. Grundidee dieses Projektes ist es, ein absolutes Positionssystem zu nutzen, um eine Positionsregelung der Quadrocoptor zu ermöglichen, ähnlich einem GPS (Globales Positionierungs-System). Die Schwierigkeit besteht nun darin, dass innerhalb geschlossener Räume ein GPS-Signal häufig nicht zur Verfügung steht und die Genauigkeit für die kleinen Fluggeräte unzureichend ist. Daher wird im Rahmen dieses interdisziplinären Verbundprojektes über drei verschiedene Vorlesungen hinweg ein eigenes Positionierungssystem des CVH, ein IPS entwickelt - ganz ähnlich dem GPS, aber eben geeignet für die Nutzung innerhalb geschlosener Räume:
- Bau eines Indoor-Postioning-Systems (IPS) mittles Ultraschall-Sendern und Empfängern (Prof. Dr.-Ing. Dietmar Gerhardt, Vorlesung "Elektronik").
Neben der Wahl geeigneter Ultraschallsender und Empfänger erarbeiten die Studierenden im Rahmen der Veranstaltung auch Methoden zur elektronischen Bestimmung der Laufzeiten zwischen den einzelnen Sendestationen und dem Empfänger. - Berechnung der absoluten Raumkoordinaten mit Hilfe eines IPS (Prof. Dr. rer. nat. Peter Gerwinski, Vorlesung "Software-Entwicklung für eingebettete Systeme"). Im Rahmen dieser Vorlesung erarbeiten die Studierenden einen Algorithmus zur Berechnung der Raumkoordinaten auf Basis der Laufzeitunterschiede der unterschiedlichen Sendestationen und realisieren diesen auf einer geeigneten Hardware.
Dabei steht insbesondere eine kostengünstige Lösung durch effiziente Nutzung möglichst einfacher Chips im Vordergrund: Das Problem soll intelligent und nicht mit Hilfe teurer Hardware gelöst werden. - Bau und Positionsregelung eines Quadrocopters (Prof. Dr.-Ing. Markus Lemmen, Vorlesung Vertiefung Mechatronik). In diesem Projektteil entwerfen und bauen die Studierende den Versuchsträger. Das IPS dient dem Fluggerät zur Bestimmung der aktuellen absoluten Raumkoordinaten. Die Studierenden entwerfen eine geeignete Psotionsregelung auf Basis der IPS-Koordinaten.
- Bau eines Indoor-Postioning-Systems (IPS) mittles Ultraschall-Sendern und Empfängern (Prof. Dr.-Ing. Dietmar Gerhardt, Vorlesung "Elektronik").
Vorlesungshinweise für Studenten
Diese Seite gibt den Studierenden des Campus Velbert-Heiligenhaus Hinweise zu den Veranstaltungen. Insbesondere finden sich hier aktuelle Änderungen sowie links zum Herunterladen der vorlesungebegleitenden Materialien.
LaTeX-Template zum ingenieurwissenschaftlichen Schreiben
Für Bachelor- und Masterarbeiten, für KIS-Arbeiten und auch für andere Dokumente, die ingenieurwissenschaftliches Schreieben erfordern, eignet sich die am CVH entwickelte Vorlage für LaTeX.
In dieser sind nicht nur die Grundlagen hinterlegt, wie unter LaTeX Dokumente zu erstellen sind sondern es sind auch in knapper Form die wesentlichen Aspekte hinterlegt, die ingenieurwissenschaftlihces Schreiben und dokumentieren ausmachen.
Aktuelle Downloads zur Veranstaltung finden Sie hier:
https://gitlab.cvh-server.de/jweber/latex-template-cvh
bzw. hier (veraltet):
https://www.cvh-server.de/~mlemmen/latex/
Den benötigten Benutzernamen und das Passwort erhalten Sie in der jeweiligen Veranstaltung bzw. per Email auf Anfrage.
Mathematik für Ingenieure 1 (CVH-002) und Lineare Algebra
Die Veranstaltung Mathematik für Ingenieure 1 bzw. Lineare Algebra am Campus Velbert Heiligenhaus (CVH) richtet sich an Bachelor-Studenten insbesondere des Studiengangs Mechatronik und Informationstechnologie.
Die Veranstaltung ist von Prof. Dr. Jörg Frochte erstellt worden (siehe www.joerg.frochte.de/lehre.html) und wird durch Prof. Dr.-Ing. Markus Lemmen ergänzt.
Aktuelle Downloads zur Veranstaltung finden Sie hier:
https://www.cvh-server.de/~mlemmen/mathematik1/
Den benötigten Benutzernamen und das Passwort erhalten Sie in der jeweiligen Veranstaltung bzw. per Email auf Anfrage.
Zu der Veranstaltung bieten wir ein Grundlagen-Tutorium an.
Prüfung Lineare Algebra / Mathematik 1: Für die Prüfung Lineare Algebra und Mathematik1 ist eine Klausur in Präsenz beantragt worden.
Klausureinsicht Lineare Algebra, Analysis 1 und Grundlagen der Mathematik für die Prüfung SS 2021 findet statt am Montag, der 20.12.2021 12:15-13:00 Uhr im Raum CVH-1.47.
Grundlagen Regelungstechnik (CVH-013)
Die Veranstaltung Regelungstechnik findet derzeit statt. Details entnehmen Sie bitte dem Stundenplan.
Unterlagen können unter der Seite
https://www.cvh-server.de/~mlemmen/grt/cvh/
unter Verwendung des Nutzernamens und Passwortes aus der Vorlesung heruntergeladen werden.
Bitte tragen Sie sich in die Emailliste ein, um Informationen zur Vorlesung zu erhalten.
Hinweis zur Übung
Folgende Aufgaben werden gerechnet oder sollten bis zur Klausur gründlich vorbereitet sein:
1.1, 1.2, 1.4
2.1
3.1, 3.4, 3.6, 3.7
4.1, 4.2, 4.3, 4.6
5 .1, 5.2, 5.3, 5.7(a)
6.1, 6.3, 6.4, 6.5, 6.6
7.2, 7.4, 7.7, 7.5, 7.6
8.1, 8.2, 8.5, 8.6, 8.8
10.1, 10.3, (10.5)
Hinweis zur Prüfung:
Hinweis zur Klausurfragestunde mit Tutorium:
Termine:
Klausureinsicht Grundlagen der Regelungstechnik für die Prüfung SS 2021 findet statt am Montag, der 20.12.2021 14:00-15:00 Uhr im Raum CVH-1.47.
Hinweis zum Praktikum:Informationen zum Praktikum finden Sie in PraktOrg.
Vertiefungs-/Wahlmodul Problembasierte Einführung in die modellbasierte SW-Entwicklung für Fahrzeuge
Die Veranstaltung findet wie im Stundenplan angekündigkt statt.
Informationen zur Veranstaltung finden Sie unter den in der Vorlesung bekannt gegebenen Account und Passwort unter dem link
Wahlpflichtmodul rechnergestützte Methoden der Regelungstechnik (CVH-026)
Die Veranstaltung findet jeweils im Wintersemester entsprechend dem Stundenplan statt.
Informationen zur Veranstaltung finden Sie unter den in der Vorlesung bekannt gegebenen Account und Passwort unter dem link
https://www.cvh-server.de/~mlemmen/vertiefung/
ACHTUNG:
Es finden Klausurfragestunden und Tutorien statt am
Montag, der 27.1.2020, 8:30 - 16:00 Uhr. Ort wird kurzfristig ausgehängt.
Projekte im Rahmen des KIS-Studiums: KIS-Praxisphase (CVH-014), KIS-Projekt (CVH-015), KIS-Projekt interdisziplinär (CVH-016)
Aktuelle Hinweise zur Vorlesung:
Alle Studenten werden gebeten einen Termin zur Besprechung des aktuellen Projektstatus und Dokumentationsstands zu vereinbaren, sofern das ncoh nicht geschehen ist.
Es wird in einigen Wochen ein erstes gemeinsames KIS-Seminar mit allen Studierenden im KIS-Seminar Lemmen geben.Der genaue Termin wird noch bekannt gegeben.
Bachelorarbeit mit Kolloquium (CVH-034)
Aktuelle Hinweise zur Veranstaltung: keine.
Fahrerassistenzsysteme und Fahrwerkstechnik (MA-CVH-4, zusammen mit Herrn Prof. Dr.Ing. Stefan Breuer)
Aktuelle Hinweise zur Veranstaltung: keine.
Fahrdynamik in Simulation und Versuch (MA-CVH-5, zusammen mit Herrn Prof. Dr.Ing. Stefan Breuer)
Aktuelle Hinweise zur Veranstaltung: keine.
Vertiefung Regelungstechnik (MA-CVH-2-3)
Aktuelle Hinweise: Die Veranstaltung findet derzeit nicht statt.
Labor- und Industrieprojekt (MA-CVH-6)
Aktuelle Hinweise zur Veranstaltung: keine.
Entwicklungsprojekt (MA-CVH-16)
Aktuelle Hinweise zur Veranstaltung: keine.
Projektsemester (MA-CVH-12)
Aktuelle Hinweise zur Veranstaltung: keine.
Masterarbeit mit Kolloquium (MA-CVH-17)
Aktuelle Hinweise zur Veranstaltung: keine.
Laborleiter

Sprechstunde:
Mittwochs nach Vereinbarung 13:30 - 14:30 Uhr.