RACELAB - Labor für Forschung, Entwicklung und Lehre in Bereichen der Regelungs- und Rechnertechnik, Aerospace und Automotive, Controls und Computer Science, Engineering Education

Das RACELAB ist ein gemeinsames Labor der Professur Regelungs- und Fahrzeugsystemtechnik (Controls and Automotive Systems) sowie der Professur Roboter- und Rechnertechnik (Robotics an Computer Engingeering).
Das Labor bietet Möglichkeiten zur (interdisziplinären und professurübergreifenden) praxisnahen Forschung und Entwicklung, fokussiert sich dabei aber insbesondere auf die praxisnahe Vermittlung von Wissen aus den Bereichen der beiden Professuren. Aus den Themen der beiden Professuren leitet sich auch der Name des gemeinsamen Labors ab:
RACELAB - Research & Robotics (Forschung und Robotik), Automotive & Aerospace (Automotive/Fahrzeuge & Luft- und Raumfahrt), Controls & Computer Science (Regelungstechnik und Rechnertechnik), Engineering & Education (Ingenieurwissenschaft und Lehre).
Das Labor ist mit 12 (Rechner-) Arbeitsplätzen ausgestattet, die je nach Bedarf mit unterschiedlichen Experimentalaufbauten ausgestattet werden können.
Automotive & Autonome Roboter
Im Bereich der Autonomen Roboter verfügt das Labor bereits seit mehreren Jahren Erfahrung. Diese Erfahrung werden derzeit auf den Bereich des Automatisierten / Autonomen Fahrens übertragen und ausgebaut.
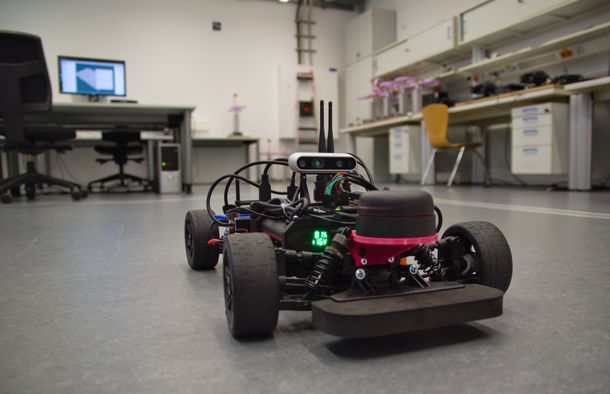
So baut das Labor derzeit eine Plattform auf in der Modellgröße 1:8 um hier auch den Studierenden bereits während des Bachelorstudiums erste (praktische) Erfahrungen in diesem Feld sammeln zu können. Hier sind insbesondere Systeme hilfreich, die ROS-kompatibel sind (ROS=Robot Operating System), da durch ROS die Herausforderungen an die Studierenden in großem Maßstab von verhältnismäßig leicht bis hin zu schwer / Forschung skalierbar sind.
Als ein vielversprechendes Beispiel ist hier unser sogenannte "VDI-Racer" zu nennen, der eine Teilnahme eines Teams aus unseren Studierenden an dem VDI-Cup Autonomous Driving erlaubt (entsprechend dem Rennreglement 2021).
Controls/Regelungstechnik: Laborpraktikum Grundlagen der Regelungstechnik

Im Labor zur Veranstaltung Grundlagen der Regelungstechnik erfolgt zunächst eine Einführung in blockschaltbildorientierten Werkzeugen der Regelungstechnik, wie Simulink (eine Erweiterung/Toolbox von Matlab der Firma Mathworks) bzw. Boris Winfact (Ingenieurbüro Kahlert). Alle Versuche des Labors werden mit Hilfe derartiger blockschaltbildorientierten Software durch die Studierenden (selbst) bedatet und geregelt.
Auf diesen Einführungsversuch bauen drei unterschiedliche praktische Laborversuche auf, die ebenfalls jeder Studierende erfolgreich absolvieren muss um das Laborpraktikum zur Veranstaltung zu bestehen:
- Zeppelinversuch: Hier besteht die Aufgabe in der Regelung des Gierwinkels eines Zeppelin (-modells) als Versuchaufbaus.
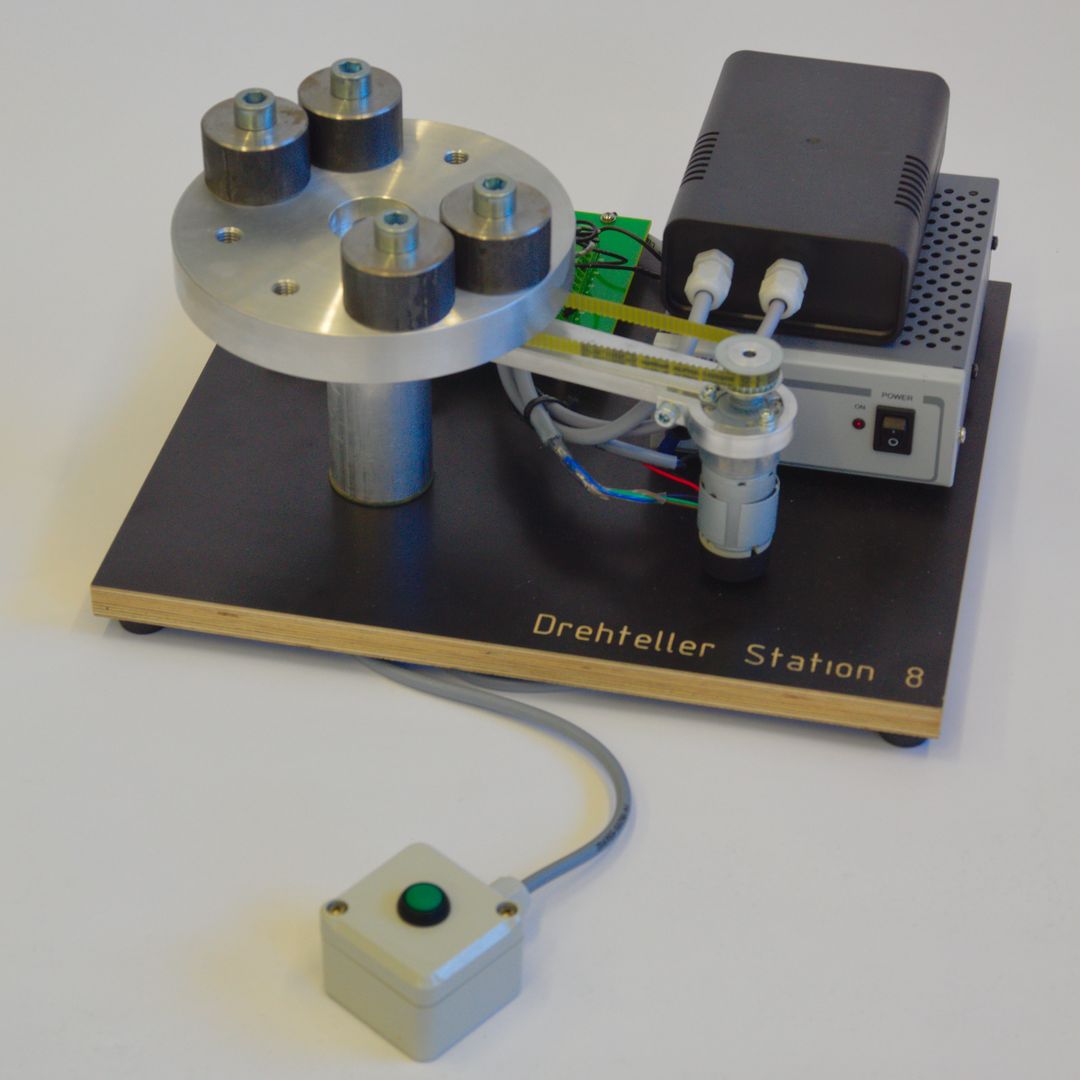
- Drehteller: Beim Drehtellerversuch haben die Studierenden die Aufgabe einen Kaskadenregelkreis zu parametrieren und zu optimieren. Der innere Regelkreis dient zur Drehgeschwindigkeitsregelung des Antriebmotors. Der äußere Regelkreis regelt die Winkelposition der über einen Zahnriemen angekoppelten Schwung- bzw. Lastmasse.
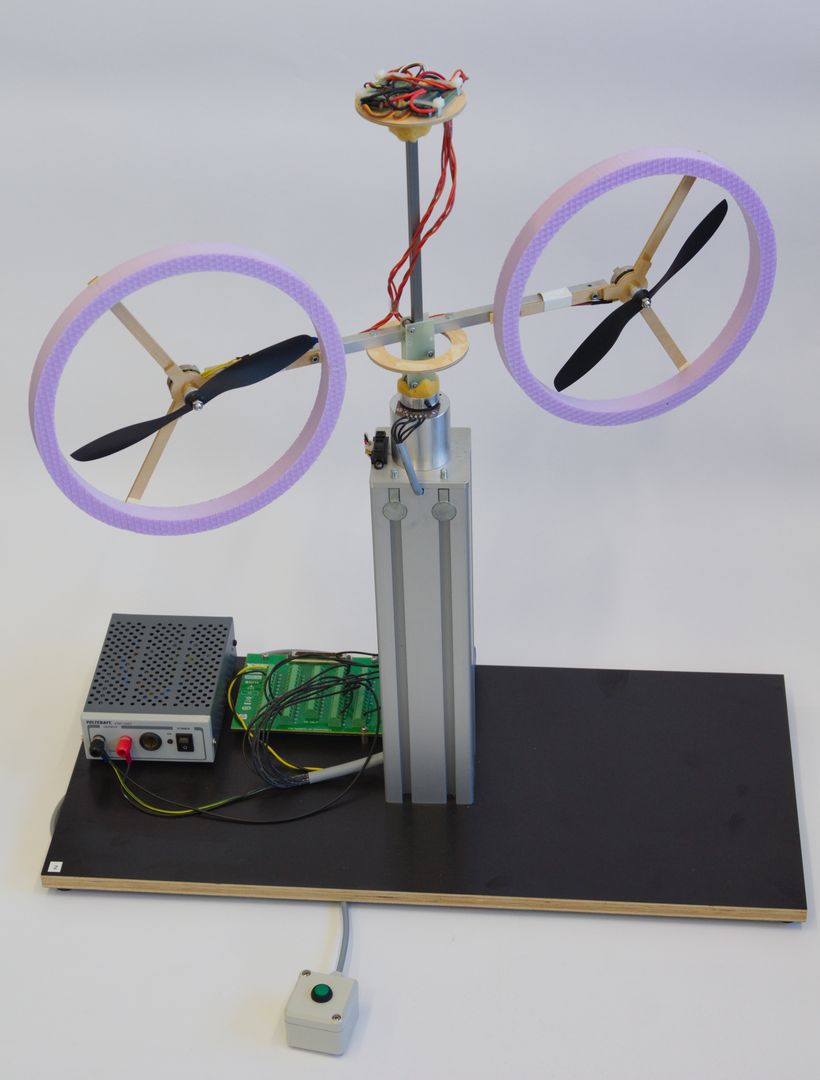
- Qudrokopter: Als Versuchsaufbau dient hier ein Modell eines (halben) Quadrokopters. Die Studierenden müssen hier in dem stark gekoppelten System zum Einen die (Flug-) Höhe des Quadrokopters regeln und zum Anderen den Gierwinkel des Quadrokopters.
Verantwortlich

